ガウスの定理
ベクトル場\(\bs{E}(\bs{r})\)について \begin{equation} \label{Gausstheorem} \int_{V}\nabla \cdot \bs{E}(\bs{r}) \mathrm dV =\int_{S} \bs{E}(\bs{r}) \cdot \bs{n}(\bs{r}) \mathrm dS \end{equation} が成り立つ。これをガウスの定理と呼ぶ。
ベクトル解析の重要な定理である、ガウスの定理の解説をしていきます。 式中の\(\nabla \cdot \bs{E}(\bs{r})\)は\(\bs{E}(\bs{r})\)の発散です。 (発散について未習の人はベクトルの発散からどうぞ)
ちなみに、左辺の\(dV\)は体積分、右辺の\(dS\)は面積分を表します。 デカルト座標ではそれぞれ\(dV=dxdydz,dS=dxdy\)のことです。(より厳密な詳細は→面積分、体積積分の記事参照。)
最後に\(\bs{n}(\bs{r})\)は 積分面\(S\)に垂直な単位ベクトルで、\(\bs{E}(\bs{r}) \cdot \bs{n}(\bs{r})\)は\(\bs{E}(\bs{r})\)のうち、 \(dS\)に垂直な成分ということになりますね。
定理の意味(レベル1)
ある領域におけるベクトルの湧き出しの総和は、 領域の表面から出ていくベクトルの和に等しい。
直感的なガウスの定理の説明です。ベクトルの発散がベクトルの湧き出しを意味することを踏まえると このような解釈になります。(発散の意味について詳しくはこちらから)
まだ抽象的で分かりづらい時は、例として水流を考えれば 「ある領域から水流が湧き出している時、その総和は領域の表面から出てくる水流に等しい」 という当然の主張になります。
証明(レベル1)
上のイメージを念頭に、より厳密に議論してききます。
証明
まずは式(\ref{Gausstheorem})が微小な直方体に対して成り立つことを示す。そのために、 微小な体積\( \Delta V=\Delta x \Delta y \Delta z\)を持つ下図のような直方体を考える。 これがベクトル場\(\bs{E}(\bs{r})\)の中にあるとする。
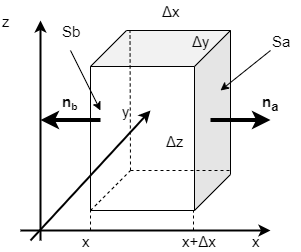
はじめに、\(x\)軸に垂直な二つの面を考える。これらを\(x\)座標が大きい方から面\(S_{a}\)、面\(S_{b}\)と呼ぶことにする。 それぞれの面における法線ベクトルは成分をかくと、図のように\(\bs{n}_{a}=(1,0,0)\)、\(\bs{n}_{b}=(-1,0,0)\)である。
面\(S_{b}\)の\(x\)座標を「\(x\)」とすると、面\(S_{a}\)の\(x\)座標は「\(x+\Delta x\)」になるので、 この二つの面上において、垂直成分の\(\bs{E}(\bs{r})\)の積分の和は \begin{eqnarray} & \ &\int_{S_{a}} \bs{E} \cdot \bs{n}_{a} \mathrm dS +\int_{S_{b}} \bs{E} \cdot \bs{n}_{b} \mathrm dS \nonumber \\ &=&\int_{S_{a}} E_{x}(x+\D x,y,z) dydz \nonumber \\ &\qquad &-\int_{S_{b}} E_{x}(x,y,z) dydz \end{eqnarray} になる。
ここで、\(E_{x}(x,y,z)\)は定数ではないが、十分積分領域が微小ならば
平均して面のど真ん中の値、\(E_{x}(x,y+\frac{\Delta y}{2},z+\frac{\Delta z}{2})\)で一定値をとるものとして近似し、積分の外へ
出すことができる。(厳密にはテイラー展開する必要があります→積分中のテイラー展開)
\(E_{x}(x+\D x,y,z)\)にも同様の近似を施すと、
\begin{eqnarray}
& \ &\int_{S_{a}} E_{x}(x+\D x,y,z) dydz \nonumber \\
&\qquad& -\int_{S_{b}} E_{x}(x,y,z) dydz \nonumber \\
&=&E_{x}(x+\Delta x,y+\harfD{y},z) \int_{S_{a}} dydz \nonumber \\
&\qquad& -E_{x}(x,y+\harfD{y},z) \int_{S_{b}} dydz \nonumber \\
&=& \left[ E_{x}(x+\D x,y+\harfD{y},z+\harfD{z}) \right. \nonumber \\
&\qquad& \left. -E_{x}(x,y+\harfD{y},z+\harfD{z}) \right] \Delta y \Delta z \\
\end{eqnarray}
のように積分を実行できる。
あとは、少し変形してあげると \begin{eqnarray} &=&\frac{1}{\D x} \left[E_{x}(x+\D x,y+\harfD{y},z+\harfD{z})\right. \nonumber \\ & \ & \left.-E_{x}(x,y+\harfD{y},z+\harfD{z}) \right] \D x \D y \D z \nonumber \\ & \ & \tolim{\D x}{0} \pdiff{E_{x}}{x}(x,y+\harfD{y},z+\harfD{z})\Delta V \nonumber \\ & \ & \tolim{\D y \D z}{0} \pdiff{E_{x}}{x}(x,y,z)\Delta V \end{eqnarray} をえる。
さて、他の\(y\)軸、\(z\)軸に垂直な二つの面のペアでそれぞれ同じ計算をすると、面積分はそれぞれ \(\pdiff{E_{y}}{y}(x,y,z)\Delta V,\pdiff{E_{z}}{z}(x,y,z)\Delta V\) になるので、この直方体全体では \begin{eqnarray} & \ &\int_{\partial (\Delta V)}\bs{E} \cdot \bs{n} \mathrm dS \nonumber \\ &=&(\pdiff{E_{x}}{x}+\pdiff{E_{y}}{y}+\pdiff{E_{z}}{z})\Delta V \nonumber\\ &=&\int_{\Delta V} \nabla \cdot \bs{E}(\bs{r}) \mathrm dV \end{eqnarray} となって、式(\ref{Gausstheorem})が示せた。(ここに、\(\partial (\Delta V)\)は\(\D V\)の表面を表す。)
最後に、微小ではない、任意の形状の領域\(V\)で式(\ref{Gausstheorem})が成り立つことを示す。
まず、どんな形状の領域であっても、その領域を微小な直方体に分割して近似することは可能である。 また、微小な各直方体に関しては式(\ref{Gausstheorem})が成り立つことが分かっているので、 全ての直方体について式(\ref{Gausstheorem})の和をとると、 \begin{eqnarray} \label{rectangularsum} &\sum_{i}\int_{\Delta V_{i}} \nabla \cdot \bs{E}(\bs{r}) \mathrm dV \nonumber \\ &=\sum_{i} \int_{\partial (\Delta V_{i})}\bs{E} \cdot \bs{n}(\bs{r}) \mathrm dS \end{eqnarray} さて、限りなく微小な直方体で領域を近似していくと、左辺の値は式(\ref{Gausstheorem})の左辺に一致する。 一方、右辺については、隣り合う面上では\(\bs{E}(\bs{r})\)の値は等しいかつ、向きが反対のため 積分が互いに打ち消しあう。 その結果、隣り合う面のない、\(S\)の表面のみ積分の値が残り、これは式(\ref{Gausstheorem})の右辺に一致する。 こうして、任意の領域でも式(\ref{Gausstheorem})が成り立つことが示せた。
近似の精度(レベル2)
任意の領域は、十分小さい直方体の積み重ねとして表現できる。
上記の証明において、最後に使った論理です。一見、直方体を使う限り、凸凹が残るように 思えますが、十分小さな極限を考えると、球のように、なめらかな領域すら表せることが分かります。
解説
ここでは厳密な証明ではなく、ざっくりとした説明を与えます。
まず、ある領域を近似的に構成するために、直方体のブロックを\(N^3\)個程度使ったする。 (イメージとしては、縦と横がそれぞれ\(N\)個くらい、高さも\(N\)個くらいブロックを使ったということ) 以下、この近似をブロック近似と呼ぶことにする。
一つ一つの直方体ブロックが大きい時、つまり近似が粗い時、表面は凸凹したものになる。 よって、当然対象の領域が丸みを帯びていると、計算結果に誤差が生じる。 しかしながら、その差は表面で生まれるため、生じる誤差は領域の表面積に比例し、 ブロック数で表すと、\(O(N^2)\)である。
ゆえに、全体に対する、誤差の割合は \begin{equation} \frac{O(N^2)}{O(N^3)} \tolim{N}{\infty} 0 \end{equation} となるため、ブロックの大きさを小さくして使用数\(N^3\)を増やすと、 つまり近似の精度を上げていくと、誤差の部分は無視できるほど小さくなるということが分かる。
面積については、一見すると全体と誤差が同じオーダーなので、誤差が無視できないように見えますが、 上手くいきます。詳しくは後で記事を書く予定。