ケプラーの第3法則
惑星の公転周期の2乗は太陽からの平均距離の3乗に比例する
ケプラーの法則の三つ目です。 数式で表すと、公転周期を\(T\)、平均距離を\(a\)とおくと \begin{equation} \frac{T^2}{a^3}=(定数) \end{equation} ということです。
導出(真円の場合)(レベル1)
惑星の軌道が真円の時、公転周期を\(T\)、距離を\(a\)とおくと \begin{equation} \label{Kepler3} \frac{T^2}{a^3}=\frac{4 \pi^2}{GM_{sun}} \end{equation} が成り立つ。(ただし、\(M_{sun}\)は太陽の質量、\(m\)は惑星の質量。)
第3法則もまた、万有引力の法則から導出できます。まずは軌道が円と近似できる場合 に(\ref{Kepler3})が成り立つことを示します。右辺は定数になっているので、 これがそのまま第3法則の導出になっています。
ちなみに、なぜ円と近似できるのかはこの記事を参照。
導出
まず、万有引力の下で運動方程式の\(r\)成分は、 \begin{equation} m (\ddot{r} - r \dot{\theta}^2)= -G\frac{M_{sun}m}{r^2} \end{equation} である。ここに\(r\)は惑星と太陽の距離である。 これは一般には時間\(t\)で変化するが、 今回は軌道を円だと近似しているので時間で変化しない (つまり、\(\dot{r}\)は0)ものとしてよい。 よって、運動方程式は \begin{equation} r \dot{\theta}^2=G\frac{M_{sun}}{r^2} \end{equation} となる。 さらに、\(r\)は惑星と太陽の距離だったが円の場合、これは常に一定である。 よって、\(r=a\)を代入して、両辺\(a\)で割ると、 \begin{equation} \dot{\theta}^2=G\frac{M_{sun}}{a^3} \end{equation} と変形でき、 これは\(\theta\)に関する微分方程式になっている。
そこで、両辺のルートをとって
時間積分する。
\begin{equation}
\int_{0}^{T} \dot{\theta} dt
=\int_{0}^{T} \sqrt{G\frac{M_{sun}}{a^3}} dt
\end{equation}
ここに、積分範囲の\(T\)は公転周期。
ここで左辺に関して置換積分する。
\begin{eqnarray}
\int_{0}^{T} \dot{\theta} dt&=\int_{0}^{T} \frac{d \theta}{dt} dt \nonumber \\
&= \int_{0}^{2\pi} d \theta \nonumber \\
&=2 \pi
\end{eqnarray}
のように計算できる。
最後に両辺を2乗して\(T\)と\(a\)を左辺に、それ以外を右辺に持っていくと \begin{equation} \frac{T^2}{a^3}=\frac{4 \pi^2}{GM_{sun}}=(定数) \tag{9} \end{equation} となって、第3法則が導けた。
導出(楕円の場合)(レベル2)
惑星の軌道が楕円の時、公転周期を\(T\)、平均距離を\(a\)とおくと \begin{equation} \frac{T^2}{a^3}=\frac{4 \pi^2}{GM_{sun}} \tag{\ref{Kepler3}} \end{equation} が成り立つ。(ただし、\(M_{sun}\)は太陽の質量、\(m\)は惑星の質量。)
実は楕円の時も、同じ関係式が成り立ちます。
楕円は円を含むのでこちらの方がより一般的です。
導出には、面積速度一定の法則と、楕円の持つ性質のいくつかを使います。
未習の人はケプラーの第2法則及び楕円とその諸性質を参照してください。
楕円の時は証明が長くなるので方針をあらかじめ整理しておきます。 以下の2ステップで(\ref{Kepler3})式を導出します。
(i)楕円の面積速度\(V_{s}\)を速度\(v\)を使わずに二通りの表しかたで表す。
(ii)二つを連立し、楕円の性質を使って変数を消去し、 (\ref{Kepler3})式を求める。
二通りの表現ですが、先に結果だけ出すと以下の通りです。
面積速度一定かつ軌道が楕円の場合、面積速度について
\begin{equation}
\label{areaspeed1}
V_{s}T=\pi ab
\end{equation}
と書ける。(ただし、\(T\)は公転周期であり、\(a,b\)は
長半径と短半径)
また、同じ仮定のもとで、面積速度は
\begin{equation}
\label{areaspeed2}
V_{s}=\sqrt{\frac{R_{1}R_{2}GM}{2(R_{1}+R_{2})}}
\end{equation}
とも表せる。(ただし、\(R_{1},R_{2}\)はそれぞれ近日点と遠日点までの距離)
導出
まずは方針通り(\ref{areaspeed1})式と(\ref{areaspeed2})式を導きます。
以下のような楕円を考える。
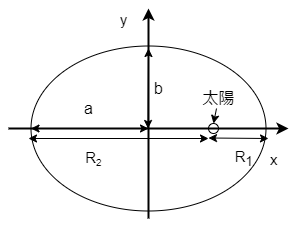
ここに、\(a,b\)はそれぞれ近日点と遠日点までの距離を表し、 \(R_{1}\)は短半径、\(R_{2}\)は長半径を表す。
面積速度の定義より、これが一定ならば \begin{equation} V_{s}T=S \end{equation} が成り立つ。ここに、\(T\)は公転周期、\(S\)は楕円の面積である。 そして、楕円については\(S=\pi ab\)なので、(これの導出は こちらから) \begin{equation} V_{s}T=\pi ab \tag{\ref{areaspeed1}} \end{equation} がいえた。
続いて、(\ref{areaspeed2})式を導く。 今、惑星が\(r=R_{1}\)または\(r=R_{2}\)に位置するとき、 速度ベクトルと位置ベクトルは直交し、これにより それぞれの速度を\(v_{1}\)、\(v_{2}\)とおくと、面積速度は \(\frac{1}{2}v_{1}R_{1}\)、\(\frac{1}{2}v_{2}R_{2}\)である。 また、面積速度一定の法則よりこれらは等しく、 \begin{equation} \label{areaspeedequal} \frac{1}{2}v_{1}R_{1}=\frac{1}{2}v_{2}R_{2} \end{equation} である。 またエネルギー保存則より \begin{equation} \label{energyconserve} \frac{1}{2}mv_{1}^2-\frac{GMm}{R_{1}} =\frac{1}{2}mv_{2}^2-\frac{GMm}{R_{2}} \end{equation} が成り立つが、この二式を連立して、速度\(v_{1}\)を\(R_{1},R_{2}\)で 表したい。
まずは(\ref{energyconserve})式について両辺\(m\)で割って変形すると \begin{equation} \frac{1}{2}v_{1}^2(1-\frac{v_{2}^2}{v_{1}^2})=\frac{GM}{R_{1}}(1-\frac{R_{1}}{R_{2}}) \tag{12} \end{equation} であるが、ここに(\ref{areaspeedequal})式を変形した \begin{equation} \frac{v_{2}}{v_{1}}=\frac{R_{1}}{R_{2}} \end{equation} を代入する。すると、 \begin{equation} \frac{1}{2}v_{1}^2(1-\frac{R_{1}^2}{R_{2}^2}) =\frac{GM}{R_{1}}(1-\frac{R_{1}}{R_{2}}) \end{equation} を得る。ここで両辺を\((1-\frac{R_{1}}{R_{2}})\)で割ると、 \begin{equation} \frac{1}{2}v_{1}^2(1+\frac{R_{1}}{R_{2}})=\frac{GM}{R_{1}} \end{equation} であるが、これにより \begin{equation} v_{1}=\sqrt{\frac{R_{2}2GM}{R_{1}(R_{1}+R_{2})}} \end{equation} となって、\(v_{1}\)を\(R_{1},R_{2}\)で表せた。
以上より、\(V_{s}=\frac{1}{2} v_{1} R_{1}\)にこれを代入することで \begin{equation} V_{s}=\sqrt{\frac{R_{1}R_{2}GM}{2(R_{1}+R_{2})}} \tag{\ref{areaspeed2}} \end{equation} が求まった。
続いて、(\ref{areaspeed1})式と(\ref{areaspeed2})式
を連立して(\ref{Kepler3})式の導出につなげます。途中、楕円
の性質を使います。
(楕円の性質について詳しくは→楕円とその諸性質)
まず、楕円の性質として、\(R_{1}+R_{2}=2a\)、 \(b=\sqrt{R_{1}R_{2}}\) が成り立つ。これを使って(\ref{areaspeed2})式を\( a,b\)を使って表すと、 \begin{equation} V_{s}=b\sqrt{\frac{GM}{4a}} \end{equation} となる。さて、これと(\ref{areaspeed1})式に代入すると \begin{equation} b\sqrt{\frac{GM}{4a}} T=\pi ab \end{equation} が得られ、これを変形することで \begin{equation} \frac{T^2}{a^3}=\frac{4 \pi^2}{GM_{sun}} \tag{\ref{Kepler3}} \end{equation} を得る。
最後に、 楕円において短半径\(a\)は焦点からの平均距離に等しい ため、第3法則が確かに導出できた。